


當機器視覺開始“理解制造”,場景數智化才能更上一階
在機器視覺行業中,視覺系統的進步往往被等同為看得更清楚。但我們把視角從實驗室或Demo現場轉向真實產線,就會發現,這一邏輯正在逐漸失去部分的解釋力。越來越多項目的瓶頸,并不在于“看不清”,而在于信息不完整、系統不穩定以及難以適配變化。換句話說,是“看得見,卻不好用”。這種“不好用”往往不會體現在單次演示中,卻會在長期運行中被不斷放大,最終演變為調試周期冗長、對環境高度敏感以及方案難以復制等一系列工程問題。
也正是在這個意義上,機器視覺正在發生一個關鍵轉變,它不再只是一個“技術問題”,而逐漸演變為“工程與系統問題”。而海康機器人在今年Vision China中所呈現的產品和場景能力,實則是在解決一個更底層的問題:當視覺能力不再稀缺時,如何讓它真正成為一種可以被規模化使用的工業能力。 這一變化也可以歸結為一個更核心的需求額命題,那就是我們要的視覺產品和系統是要能“理解制造”。這種理解,并不只是識別結果的準確與否,而是體現在信息獲取是否全面、空間表達是否完整,以及系統是否能夠在復雜工況下穩定運行。 圍繞這一目標,我們也發現了海康機器人產品和方案能力的演進路徑:算法能力→設備能力→場景覆蓋能力→真實痛點的解決能力。 改變視覺產品的信息結構,是“理解制造”的開始 在工業檢測領域,很常見的痛點是單一圖像很難同時承載多種類型的缺陷信息。尤其是在PCB、電芯等反射屬性各異的材料上,劃痕、臟污與凹坑分別對應不同的光學響應機制,即便分辨率再高,單一維度的成像方式也難以兼顧。 因此,問題的本質并不在于圖像是否足夠清晰,而在于信息維度是否足夠豐富。 在這一背景下,海康機器人高速線陣2.5D視覺檢測系統的意義,不在于單一性能的提升,而在于對“信息結構”的重構,獲取高維度信息是視覺方案成功與否的關鍵。通過線陣相位投影成像技術,在一次掃描過程中獲取多種光學響應,輸出標準圖、漫反射圖、鏡面圖、光澤比圖及形狀圖等多類型結果圖,并提取不同于2D與3D成像技術的高維深度變化信息,可覆蓋全類型缺陷,實現復合檢測效果。系統實際上將原本依賴單張圖像的檢測邏輯,轉變為基于多信息融合的判斷方式。 這一變化的意義在于將原本高度依賴經驗的、非標準化的“選圖過程”,轉化為更加可控的數據組合過程,從而顯著降低調試復雜度,并提升方案的穩定性與可復制性。在實際應用中,這種方式能夠穩定識別PCB板表面的輕微劃傷、臟污、凹坑、異物等多類缺陷。 但更值得注意的是,這種“看得更全”的能力,只有在系統能夠實時處理的前提下才有意義。大量圖像數據如果無法在產線節拍內完成處理,反而會成為新的瓶頸。 那么,自然就會有朋友要問了,高算力和處理大量數據影響穩定性的問題如何解決? 據現場介紹,海康機器人在底層配備了2.5D視覺檢測系統的專用工控機,通過高性能處理器平臺與DDR5高速內存架構,并支持GPU擴展與視覺算法加速,使多通道圖像融合與高精度相位解調能夠在高負載條件下穩定運行。也就是說,即便多相機并行滿載采集的極限工況下,依然可以實現多結果圖的實時輸出且不掉幀,從而與產線節拍保持一致。 這一點其實也說明了,我們所說的視覺能力的上限,不僅取決于算法本身,還取決于底層算力架構是否能夠支撐系統穩定運行。 類似的思路也體現在海康機器人穹頂光2.5D系統中,通過分區照明與光度立體算法的結合,并支持線掃成像,該系統能夠在物體運動過程中完成采集與融合,從而在保證檢測精度的同時,還能滿足產線的高節拍要求。 從這一系列變化可以看到,在更加細分的檢測場景中,大家的競爭方向正在發生遷移:看得清是過去式,現在不僅要看得全,還得跑得又快又穩。 當視覺進入3D,本質是在建立“完整空間理解能力”

但是要說“看的全”的必要性,我們相信3D視覺的需求會更大。 如果說2.5D系統解決的是信息維度問題,那么3D視覺所面對的,則是空間表達的問題,這個的實現難度不用過多闡述。在實際工程中,3D方案失敗的原因,很少是單純的精度不足,反而更多來自于空間信息的不完整,例如測量盲區、點云不連續以及多設備之間難以融合。 這些問題本質上都指向同一個核心,空間是否能夠被完整建模。我們還是類比人眼,人眼是站在上帝視角把物體的全貌看清楚,那么對于它的各個位置、形狀、大小的各項細節會了如指掌。同樣的,在產線和工況復雜的場景中,如果視覺系統能夠站在上帝視角,那么它能解決的場景將會非常豐富。 而海康機器人最近推出的3D測量的多種方案,實際上都圍繞這一問題展開。例如,在新品DS高精度面結構光系統中,通過移相編碼與多幀曝光融合,使其在復雜反光環境下仍能輸出穩定點云,并實現對BGA錫球高度、共面度與位置度的高精度測量。然而,其真正價值并不只是精度本身,而在于能夠持續輸出“連續、可用”的空間數據。 在折疊屏鉸鏈檢測場景中,通過雙目單線激光輪廓傳感器的視野融合,不僅消除了傳統三角測量帶來的盲區,還通過公共視野提升了信噪比,從而有效抑制金屬雜光干擾,使空間信息從“局部可見”轉向“整體可用”。 在散熱片測厚以及管道360°檢測方案中,通過對射結構與環視拼接,實現了非接觸式的全域掃描與實時三維重建,從而避免了傳統測量方式中的漏檢與結構誤判問題。 這些方案雖然應用各異,但底層邏輯是一致的,從對“單點或局部”的測量,轉向對“整體空間”的理解。當空間能夠被完整建模之后,測量、檢測與定位不再是獨立任務,而成為空間理解的自然結果。 讓視覺與AI參與“決策”,我們才能真正走向智能化 前文說到,看得清是過去式,那么自動化系統的升級也容易被簡單理解為“執行得更準”。但在真實工業現場環境始終是不確定的,而傳統自動化卻建立在確定性前提之上,所以,我們現在的非標項目越來越多,定制化產品也越來越多,那么成本自然也就上升了。工件形變、來料偏差以及多設備協同誤差,會不斷打破預設路徑的有效性,使得依賴固定流程的系統難以長期穩定運行。 那么,怎么解決?難道還是遇事不決上AI?不,還要加上視覺能力,最好還得是3D視覺。 這一點在海康機器人的3D視覺引導方案中體現得尤為明顯。無論是五軸點膠系統中基于實時輪廓生成路徑,還是螺絲無序抓取中通過點云與算法完成目標選擇與避障,本質上都是讓執行過程從“預設路徑”轉向“感知驅動”。而在輪轂裝配等復雜場景中,多相機建模與協同調度進一步實現了對動態偏差的實時補償,使系統能夠在變化中保持精度。 散熱片對射測厚 如果說3D視覺解決的是空間如何被理解,那么AI解決的是如何處理變化。 但在工業AI落地過程中,一個更深層的瓶頸往往并不在模型本身,而在模型賴以存在的基礎“燃料”——數據。尤其是在缺陷檢測場景中,企業的良品率都相對可觀,導致劃痕、臟污、破損等異常屬于稀缺事件,這使得模型訓練長期面臨“數據不足卻必須上線”的現實約束。 針對這一關鍵問題,海康機器人將大模型在線樣本生成能力引入到智能產品線之中,從源頭重構數據獲取方式。通過對正常產品圖像進行深度學習,系統可以在輸入缺陷類型(如“劃痕”“臟污”)后,自動生成具有真實光照、材質與結構變化的高逼真缺陷樣本,不僅能夠模擬常見異常,還可以覆蓋長尾甚至極端工況。 這一能力的意義,我們認為并不僅僅在于補充數據規模,更重要的是它將原本依賴物理采集的數據獲取過程,轉化為一種可控、可擴展的數據生成能力,對于降低模型訓練對現實采樣的高度依賴,和大幅縮短模型從構建到部署的周期,有著非常直觀的價值。 另外,海康機器人還展示了大模型算法在數據識別方面的應用。這一模型相比于傳統CNN模型在字符識別能力方面就有明顯提升,搭載了該模型的海康機器人SC6500P智能相機能夠在晶圓不同工藝段依然實現高精度識讀。 還有適用于標簽缺陷檢測SC5000X則通過邊緣學習,在少量樣本條件下完成模型部署,并實現檢測與控制的實時閉環響應,而且能夠在產線換型后快速適配。 可以看到,工業AI的價值,并不在于模型是否具備更強的通用性,而在于所依賴的數據是否真正具備場景易用性和可拓展性。數據不再受限于采樣成本與稀缺性,而是能夠圍繞具體場景持續擴展與優化,這使得模型訓練從被動積累,轉向主動構建。 也正是在這一基礎之上,工業AI才有可能真正嵌入設備運行過程之中,并與視覺感知與控制執行形成完整閉環,從“提供判斷”走向“參與決策”,從而在復雜且持續變化的工業現場中,具備長期穩定運行的能力與工業化價值。 國潮智造社觀察 當視覺開始“理解制造”,自動化才真正具備場景化能力。 從整體來看,可以發現一個貫穿始終的變化:海康機器人并不是在單點提升視覺性能,而是在構建一種能夠支撐工業現場復雜性的系統“理解”能力。這種能力體現在信息獲取的全面性、空間建模的完整性、執行過程的適應性以及AI能力的工程化落地上。 也正是在這個意義上,機器視覺的角色正在發生變化,從“看見世界”,走向“理解制造”。而當這種理解能力逐步建立起來之后,自動化系統的邊界才真正被打開,非標場景也才有機會走向可復制的工業能力體系。







 投訴建議
投訴建議
提交

ZEISS GEAR PRO 一鍵搞定特殊齒輪高精度測量
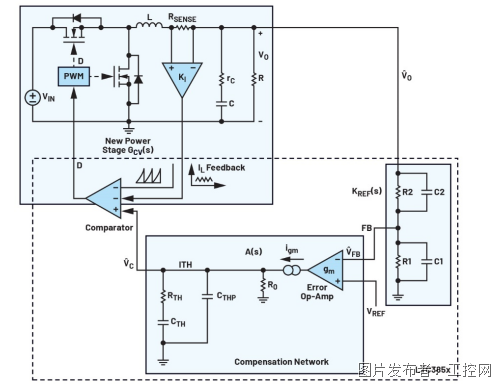
了解電源環路穩定性和環路補償 ——第3部分:簡單三步完成環路設計

專訪Thomas Fehn博士:當AI遇上激光,通快在做哪些“看不見”的布局?
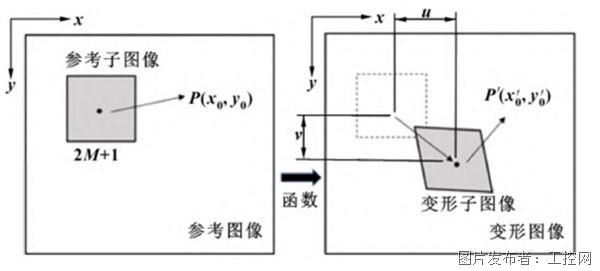
DIC應變測量系統用于鎳基合金薄板沖頭沖擊變形試驗

品英Pickering為航空、低空航電設備和電池保駕護航