


機器人行業洞察:訪越擎科技創始人,談深圳工業展與具身智能機器人的應用落地
摘要:2026 ITES深圳工業展3月31日至4月3日在深圳會展中心舉辦,超1500家海內外品牌參展,具身智能機器人的展覽更是人潮涌動。面對技術爆發期的具身智能機器人在各個行業的應用,本次通過專訪機器人設計與仿真軟件開發商越擎科技創始人,作為一線的具身智能落地的服務企業,如何看待目前的具身智能的發展趨勢與落地節奏。
2026 ITES深圳工業展,又稱第27屆ITES深圳工業展暨高端裝備產業集群展,是于2026年3月31日至4月3日在深圳國際會展中心(寶安)舉行的一場工業展覽會。該展覽以“穿透產業·智造聚變”為主題,16萬平方米展館匯聚超1500家海內外工業品牌,展示具身智能、AI服務器、半導體裝備、新能源汽車等前沿應用,并舉行80余場主題論壇,核心內容包括高端裝備、機器人及自動化、精密零組件三大主題展。
具身智能機器人的發展離不開軟硬件生態的完善,而落地則直指具體的應用場景,作為工業機器人軟件廠商,主要專注的是工業應用的場景,也面臨著各種不同應用場景的企業需求,為此,我們采訪了機器人設計與軟件開發商越擎科技創始人,從機器人工業軟件的研發與落地角度上,進一步了解企業在具身智能行業的思考與落地。

首先,我們先了解一下南京越擎信息科技有限公司的背景,核心產品是機器人設計與仿真軟件iRobotCAM。基于三維CAD的架構與自研的物理引擎,針對具身智能設計需求,iRobotCAM支持串聯機器人與并聯機器人的設計,從數據源頭上保障具身智能設計的正確性,支持URDF輸出與MuJoCo XML輸出,對接MuJoCo, ISAAC SIM等各類仿真軟件與訓練軟件的應用,滿足人形機器人,四足機器人,飛行機器人等具身智能體的設計; 針對工業機器人的加工需求,從架構上解決三維建模場景中存在的應用精度問題,通過建立工業機器人的數字化場景,可以滿足機器人焊接,噴涂,雕刻,拋光打磨,激光切割,電弧增材,碳纖維3D打印等高精度的應用場景。
舉個簡單的例子,一個機器人,不管是具身智能機器人或傳統工業機器人,首先要做的是動作規劃,就像人一樣,你得知道讓機器人做什么樣的動作來完成什么樣的工作。更具體的講,就跟現在很火的小龍蝦openclaw一樣,你得教他用什么樣的技能,完成什么樣的工作。而具體到工業場景的落地上,各種技能則更是千差萬別了。但我們抽取出共性問題,那就是數據的可靠性,原生數據的準確性是一切的基礎,這也是為什么工業軟件企業在應用場景的落地的關鍵所在,需要滿足0.01mm級或更高精度的應用需求。

問題1:具身智能賽道非常火熱,現在慢慢已經出現很多提示具身智能的落地風險的問題了,越擎科技作為典型的機器人設計與仿真軟件的企業,作為具身智能落地感受比較深刻的企業,如何看待具身智能過熱的問題?
越擎科技創始人(唐懷磊):我們在深圳工業展上可以看到具身智能的從業者齊聚一堂,共商具身智能的技術發展方向,正處于技術的爆發期與落地期,首先過熱有點言過其實; 從產能的數據看,具身智能的機器人的產能才剛剛過萬級,與幾十萬級的傳統工業機器人的產能不可同日而語,而更進一步講,面對著未來的機器人智能化而產生出的應用落地的需求,可能千萬級的,只能說具身智能的落地才剛剛起步。而目前所謂的過熱,應該是指當前落地應用的具身智能的數量級沒有預期中的爆發快。
從具身智能的落地預期上,我們看到傳統的工業機器人,那是幾十年積累起來的應用場景,汽車,家電,消費電子等各種黑燈工廠,那都不是幾年就建立起來的,而是基于幾十年的工業應用的共建才發展起來的。所以對于具身智能,核心還是上下游的生態共建,才能加快落地節奏,要具備一定的耐心。
問題2:具身智能的落地上,有什么關鍵阻礙嗎?
越擎科技創始人(唐懷磊):落地的相關方的協同是最重要的,具身智能的落地的場景主要涉及的不外于軟件與硬件,硬件是可靠性與精度,而軟件則是要滿足細分場景的柔性化應用。
具體的講,硬件除了背后的制造供應鏈外,硬件要表現出來的精度則是產品力的核心體現,打個比方,工業機器人的應用精度是0.1或0.01mm,一個數量級別的差別,這就是工業級別的應用的要求,這遠遠不是普通的表演機器人可比的。軟件要面對著各種機器人的應用場景,比如說典型的汽車廠的焊接與噴涂,電子產品的打磨與噴涂,飛機制造的打磨與噴涂,等等,這些都是通用的機器人加專用的技能才能解決,而技能的訓練則需要柔性,以從業人的角度來看,那就是機器人軟件要具體柔性化的設計,適配這些應用場景。
除了硬件和軟件的核心能力外,這里有一個關鍵參與方,也是最核心的用戶場景,具身智能的核心能力除了在軟件上調試外,還需要實打實的用戶場景的迭代與驗證,這就是為什么工業應用場景的落地節奏比預期更慢的原因。
但我們從深圳工業展可以看到的非常積極的一面,以人形機器人為例,核心的靈巧手部件已經步入成熟期了,以因時機器人為代表,其出貨量已經突破萬級。同時,靈巧手的部件已經模塊化,說明未來的技術可能迎來加速期,而供應鏈也迎來成熟期。
當硬件與軟件上都展現出積累的技術積累時,用戶端已經看到了落地的可能性了,用戶的場景的落地也就是順理成章,指日可待了。
問題3:iRobotCAM作為機器人設計與仿真軟件,在具身智能賽道主要是解決什么落地的問題的
越擎科技創始人(唐懷磊): iRobotCAM作為典型的具身智能設計與仿真軟件,主要解決的是兩個核心問題,
1. 機器人結構設計到具身智能設計的跨越:對于所有的設計企業來講,如何設計具身智能機器人涉及到各種新的知識結構的積累,而iRobotCAM正是為了解決這個問題而開發,基于CAD的高精度的軟件架構,利用具身智能的設計思路來設計具身智能機器人,通過骨架式的設計流程,就可以設計出滿足動力學架構的模型,與Isaac sim, opensim, mujoco等仿真生態對接。
2. 機器人的行為規劃能力:機器人設計出來了,也造出來了,那用來做什么工作?iRobotCAM具備行為規劃能力,規劃機器人的運動,適配機器人的應用場景。比如說,機器人用來抓放,機器人用來焊接,機器人用來激光切割,還是做什么工作,iRobotCAM具備規劃各種不同類型的行為運動的軌跡能力。

問題4:如何看待未來具身智能的落地節奏
越擎科技創始人(唐懷磊):作為機器人應用落地的一線軟件服務商,各個行業各不相同,我們只能從自身的理解來展望具身智能的落地節奏,以供參考
1. 機器人的數據源快速增長:如果具身智能的落地加快,而數據源頭是一個行業指標,而如何形成高質量的機器人動力學模型則是關鍵,而iRobotCAM就是加速這一過程的工具,可以快速的從結構設計轉向具身智能設計。而當高質量機器人動力學模型出來了,那后續的仿真與訓練的效率將會幾何級的提升。
2. 工業應用場景的突破:工業應用場景有天然的需求,當各種具身智能的數據在各個工業場景中連接,那具身智能的上下游產業鏈將會得到跨越式的完善,邁向成熟的應用。
問題5:作為業內人士,預測下具身智能機器人的爆發時刻
越擎科技創始人(唐懷磊):具身智能的爆發勢不可擋,這是技術發展的必然,很多科幻或想象中的東西正在慢慢變成現實,但畢竟每個人所處的行業或視角各不相同,自身的預測不一定準確,從我們自身的發展規劃來看,我們重點是與用戶打磨好應用場景,加快工業化場景落地的節奏。如果說一定要有個時間來預測的話,跟緊具身智能的風向標企業,硬件是一個先行指標,硬件的突破將會是工業場景的落地的爆發到來的時刻,而這個時間不會太遠,我們期望三年內可以看到,目前我們的iRobotCAM機器人設計與仿真軟件具備人形,四足等具身智能體的設計能力,有非常多的人形機器人公司,靈巧手公司與我們合作,我們也為具身智能的生態的發展進一步加大投入。




 投訴建議
投訴建議
提交

嵌入半導體創新的關鍵節點:TEL的產品版圖與戰略雄心

探秘西門子直流技術:突破傳統,引領未來
星匯傳感ITES演講直擊丨國產力傳感破局正當時
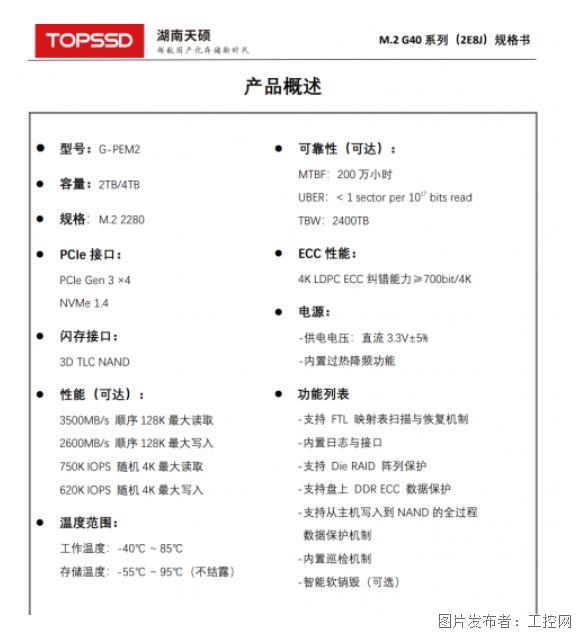
天碩解讀工業級SSD核心指標:OP空間、寬溫閃存與兼容性測試

天碩技術解析:航天級固態硬盤如何實現抗輻照加固與主動容錯